Geo-monitoring provides quantitative and reliable information to identify hazards and adopt appropriate measures timely. However, this task inherently exposes monitoring staff to hazardous environments, especially in underground settings. Since 2000s, robots have been widely applied in various fields and many studies have focused on establishing autonomous mobile robotic systems as well as solving the issue of underground navigation and mapping. However, only a few studies have conducted quantitative evaluations of these methods, and almost none have provided a systematic and comprehensive assessment of the suitability of mapping robots for underground geo-monitoring.

Robot in the Silver Mine Freiberg, Reiche Zeche, Freiberg, Germany
Researchers from TU Bergakademie Freiberg, members of ISM Commission 3, have proposed a methodology for objective and quantitative assessment of the applicability of SLAM methods in underground geo-monitoring. This involves the development of an underground test field and some specific metrics, which allow detailed local accuracy analysis of point measurements, line segments, and areas using artificial targets. With this proposed methodology, a series of repeated experimental measurements has been performed with an autonomous driving robot and the selected LiDAR- and visual-based SLAM methods. The resulting point cloud was compared with the reference data measured by a total station and a terrestrial laser scanner. The accuracy and precision of the selected SLAM methods as well as the verifiability and reliability of the results are evaluated and discussed by analysing quantities such as the deviations of the control points coordinates, cloud-to-cloud distances between the test and reference point cloud, normal vector, centre point coordinates and area of the planar objects.
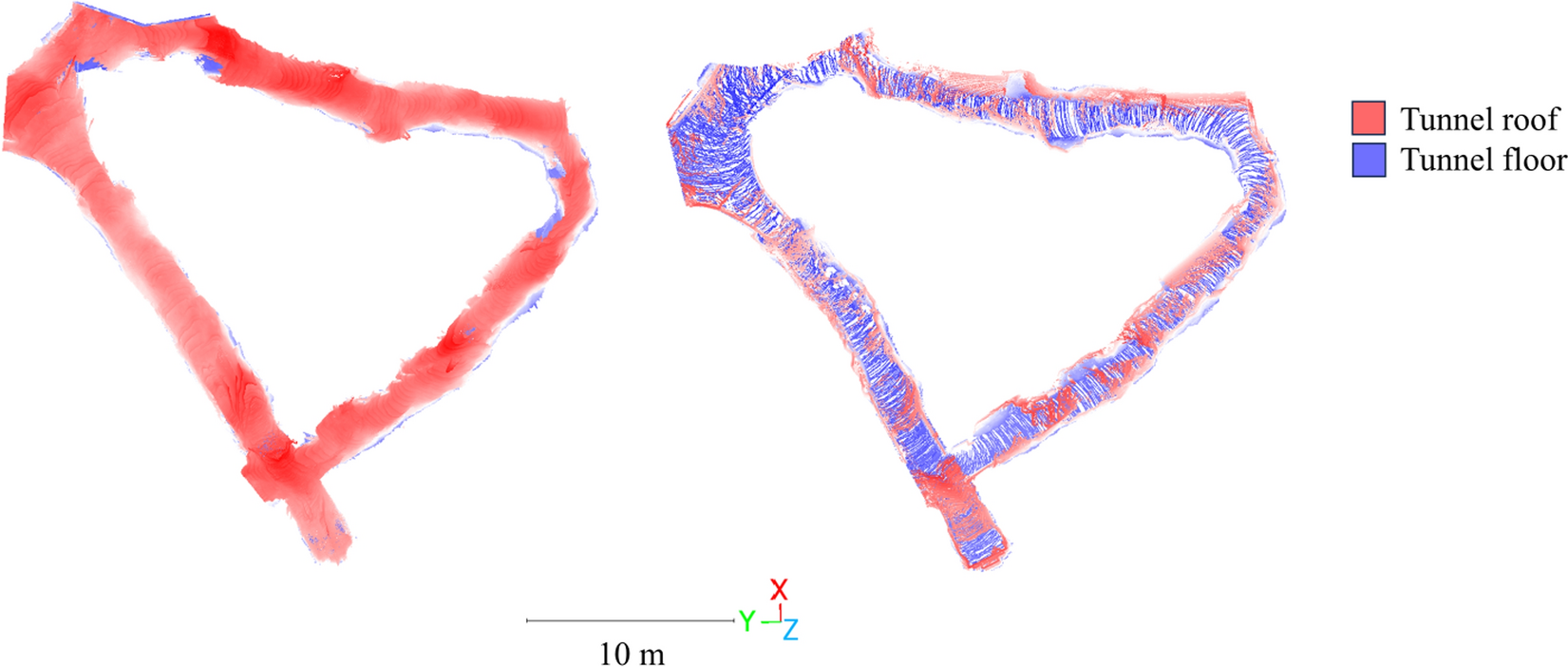
Top view of point cloud collected by RTAB-Map (left) and HDL Grap SLAM (right) showing point cloud density
The results demonstrate that the HDL Graph SLAM achieves satisfactory precision, accuracy, and repeatability with a mean cloud-to-cloud distance of 0.12 m (with a standard deviation of 0.13 m) in an 80 m closed-loop measurement area. Although RTAB-Map exhibits better plane-capturing capabilities, the measurement results reveal instability and inaccuracies.
This study has been published on the International Journal of Coal Science & Technology. The authors include Jing Li, Jörg Benndorf, and Paweł Trybała.
Link: https://link.springer.com/article/10.1007/s40789-025-00745-w

Copyright:CHINA UNIVERSITY OF MINING AND TECHNOLOGY Support:School of Environment and Spatial Informatics 京ICP备案号:2021034985号